توضیحات
Hardware
PMU V2 – New case design with CANBUS port. Enhanced BEC functionality, better heat dissipation. Extra CANBUS ports, enhances the expandability of the system and will support Gopro Zenmuse, iOSD and Bluetooth module for assistant software use on smart phones in the future, etc..
NAZA V1 can also be upgraded using PMU V2 and support Gopro Zenmuse, iOSD and Bluetooth module..
Firmware and functions
- New attitude stabilization algorithm, provides better flight performance / maneuverability
- New flight control performance, provides better flight experience; (flight control is smoother, take‐off is easier)
- Support for Octo‐rotor
- One‐motor stopped still can land safely (Hexa‐rotor, Octo‐rotor)
- Automatic course deviation compensation, reduced the effects of magnetic disturbance interference
around the compass detection & warning - Added IMU advanced calibration, error identification and warning, reduced the impact of sensor error
to the flight performance
Features
All-in-one Design
DJI adheres to continuous innovating and improving, with the new firmware, new attitude stabilization algorithm and optimized hardware structure, the Naza-M V2 provides better flight performance. The innovative All-in-one design simplifies installation and saves space and weight. It contains inner damping, controllers, 3-axis gyroscope, 3-axis accelerometer and barometer in its light and small Main Controller. It can measure flying altitude, attitude and therefore can be used for autopilot/automatic control.
Independent PMU with amazing function extension
The Naza PMU V2 has enhanced BEC functionality and provides extendable CAN BUS ports, which can support iOSD, Zenmuse H3-2D gimbal (pitch control). Support is also included for optional Bluetooth LED module to allow parameter adjustment via a mobile APP (future firmware upgrade required for this functionality)

Advanced & Improved Attitude Stabilization Algorithm
The latest fourth generation attitude stabilization algorithm not only inherits the outstanding flight stability of DJI products, but also provides excellent maneuverability even without the GPS module. It is more flexible and stable, and gives the hobbyists a wonderful flight experience. New features have been included such GPS course automatic compensation, GPS & Compass sensor calibration, new take-off mode and so on.
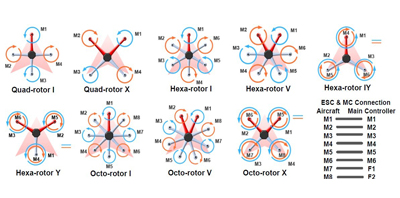
Nine Types of Multi-rotors Supported
Naza-M V2 now supports nine types of multi-rotor, which meets the different needs of the enthusiasts.
- Quad I, Quad X;
- Hexa I, Hexa V, Hexa Y, Hexa IY;
- Octo X, Octo I, Octo V; ( Naza-M V2 does not support the aircraft which has large vibration, so when you choose to use hexa-rotor or octo-rotor, please pay attention to the vibration situation and try to do some vibration dampening)
Multiple Flight Control Modes/Intelligent Switching
It offers three types of control modes: GPS Atti. Mode (with GPS module), Atti. Mode, Manual Mode. The pilot can switch between the three modes to achieve different flight characteristics. It also can adjust automatically within the flight environment and intelligently switch between GPS Atti. Mode and Atti. Mode to make sure the flight is safe and secure. In the software at the position of the manual mode you can choose manual, attitude or failsafe; it supports one key failsafe trigger.
GPS Module Available/Accurate Position Hold
The plug and play GPS module will greatly enhance the performance for Aerial Photography with Position Hold, Return-To-Home and Intelligent Orientation Control functions. With the GPS Module, the multi-rotor will have position and altitude locked even in windy conditions. Hovering accuracy is approximatley 2.5m horizontal and 0.8m vertical.
Intelligent Orientation Control
Usually, the forward direction of a flying multi-rotor is the same as the nose direction. By using Intelligent Orientation Control (IOC), wherever the nose points, the forward direction has nothing to do with nose direction.
In course lock flying, the forward direction is the same as a recorded nose direction.
In home lock flying, the forward direction is the same as the direction from home point to multi-rotor.
Enhanced Failsafe Mode
If your transmitter supports failsafe, then you can set failsafe through port-U. Naza controller has built-in auto level failsafe function, which means when the communication between MC and the transmitter is disconnected, the outputs of all command sticks from controller will go to center position. If the GPS module is used, you can also set RTH on failsafe. If your transmitter has only 4 channels, then MC will work in Atti. Mode by default without the failsafe function.
Two Levels of Low Voltage Protections
In order to prevent your multi-rotor from crashing or other harmful consequences caused by low battery voltage, we have designed two levels of low voltage protection. You can choose not to use this, however we strongly recommend you to enable the protection. Both levels of protection have LED warning as default. The first level will blink the red light continuously; the second level will blink red light continuously and the multi-rotor will descend and land. In manual mode when low voltage protection is triggered the LED warning will be active only.

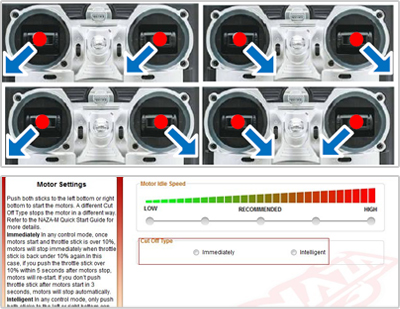
Motor Arm and Motor Dis-arm
There are four ways to start the motors, see the following picture:
When you want to start the multi-rotor, you need to perform any of the ways of CSC. During the flight, if the motors stop, you can immediately execute the CSC and the motors will start. This enhances the safety of the multi-rotor; no uncontrolled starting of the motors.
Motor Disarm: There are two modes of Motor Disarm: namely Intelligent Mode and Immediate Mode. For more information, please refer to the user manual or DJI Wiki.
Note: It has a brand new, smoother take-off algorithm, which is more stable and provides a brand-new experience and supports double spring TX; every time you let go of the throttle stick it will hover.
PPM, S-BUS & Ordinary Receiver Supported
Minimum Four channel receiver supported, also PPM and Futaba S-Bus receiver supported. PPM & S-Bus receivers (the general use of the first 8 channels of S-Bus receiver) to optimize the channel connection, the A, E, T, R, U five-channel functions are set using channel X2, use only one servo cable to connect the PPM or S-Bus to X2, this makes installation quick and easy, not easy to make mistakes.
Independent LED Module
The Independent LED module makes the indication of the flight status and the system status to the ground much clearer. The pilot can get information more quickly and more conveniently, even at night, he/she can get real-time flight information feedback through the LED flashing frequency and colour. In addition, the module has a USB interface, which is used for parameter settings and firmware upgrade.
Built-in Gimbal Stabilization Function
The gimbal stabilization module is compatible with almost all 2-axis gimbal systems (servo driven gimbals). The system will adjust the gimbal and camera according to the attitude of the aircraft after setting the parameters the first time.
Multi-rotor One-power Output Fail Protection
In most conditions, the whole multi-rotor will retain good attitude and rotate around the frame arm with no power output, due to imbalanced mechanical structure and external environment. Rotating is mainly caused by payload and external environment. Payload heavier, rotating speed is faster. On rotating, the hexa-rotor physical structure causes rudder out of control. This humanistic protection function from Naza-M V2, in Attitude or GPS Mode, makes attitude still under control even with any one power output failed and highly reduces crash risk.
Remote Gain Adjustment
The default parameter settings are OK for you to achieve a normal flight, and it also supports remote parameter adjustment by using a control slider on the TX during flight, in order to obtain better performance.
New Assistant Software & Firmware Online Update
The user interface of the assistant software has been comprehensively updated and brings you a new interaction experience, and instructions will automatically appear which is very convenient. In addition, on the left side of each menu section there is additional information. The logical design makes your parameter settings more simple and convenient. Like other DJI products the Naza-M V2 firmware can be upgraded free online.
| Basic Performance | Supported Multi-rotor | Supported ESC output | Recommended Transmitter | Working Voltage Range |
|---|---|---|---|---|
| Quad-rotor I4, X4 Hex-rotor I6, X6, IY6, Y6 Octo-rotor I8,V8,X8 |
400Hz refresh frequency | PCM or 2.4GHz with minimum 4 channels | MC:4.8V~5.5V VU Input: 7.4V ~ 26.0 V (recommend 2S ~ 6S LiPo) Output(V-SEN port red wire): 3A@5V (burst current:7.5A) |
|
| Power Consumption | Operating Temperature | Assistant Software System Requirement | ||
| MAX: 3.15W(0.25A@12.6V) Normal:1.638W(0.13A@12.6V) |
-10°C ~ 50°C | Windows XP sp3 / Windows 7 / Windows 8 | ||
| Flight Performance | Hovering Accuracy (GPS Mode) |
Max Yaw Angular Velocity | Max Tilt Angle | Ascent / Descent |
| Vertical:±0.8m Horizontal:±2.5m |
200°/s | 35° | 6m/s,4.5m/s | |
| Hardware | Weight | Dimensions | Built-In Functions | |
| MC:27g PMU:28g GPS:27g LED:13g |
MC: 45.5mm x 32.5mm x 18.5mm PMU: 39.5mm x 27.5mm x 10.0mm GPS & Compass 46mm(diameter)x10mm LED: 25mm x 25mm x 7.0mm |
Multiple Autopilot Control Mode Enhanced Fail-safe Low Voltage Protection S-Bus Receiver Support PPM Receiver Support Independent PMU Module 2-axle Gimbal Support |
Note: Flight Performance can be effected by mechanical performance and payloads