

در بخش اول با اجزاء مختلف موتور های براشلس آشنا شدیم. در این بخش با نحوه انتخاب موتور براشلس برای کاربرد خود آشنا خواهیم شد.
چگونه سایز موتور را انتخاب کنیم؟
سایز اجزاء با این ترتیب می تواند انتخاب شود: سایز فریم ¬ سایز پروانه ¬ سایز موتور
با دانستن سایز فریم، می توانیم سایز موتوری را که باید استفاده شود انتخاب کنیم. سایز فریم، سایز پروانه را محدود کرده و سایز هر پروانه به یک RPM موتور متفاوتی نیاز دارد تا نیروی پیشران را بهینه تولید کند، این جایی است که KV موتور وارد قضیه می شود.
همچنین باید مطمئن شد که موتور ها گشتاور کافی را برای چرخاندن پروانه ها تولید می کنند، این جایی است که سایز استاتور وارد قضیه می شود. معمولا سایز بزرگتر استاتور و KV بیشتر یعنی جریان بیشتر.
جدول زیر یک راهنمای عمومی است، نه یک قانون سفت و سخت، مواردی نیز وجود دارد که موتور ها با مقادیر کمی بیشتر یا کمتر از جدول پیشنهادی انتخاب می شوند.
اینگونه فرض شده است که یک کواد را با 4 سل باتری لیتیوم پلیمر تغذیه می کنید و سایز فریم بسته به مراکز پروانه ها است (فاصله قطری موتور تا موتور).
| سایز فریم | سایز پروانه | سایز موتور | KV |
| 150mm یا کمتر | 3” یا کمتر | 1105 – 1306 یا کمتر | 3000 یا بیشتر |
| 180mm | 4” | 1806 | 2600 – 3000 |
| 210mm | 5” | 2204 – 2208، 2306 | 2300 – 2600 |
| 150mm | 6” | 2204 – 2208، 2306 | 2000 – 2300 |
| 350mm | 7” | 2208 | 1600 |
| 450mm | 8”، 9”، 10” یا بیشتر | 2212 یا بیشتر | 1000 یا کمتر |
مصرف ولتاژ و جریان موتور براشلس
مهم است که بدانید ولتاژ نقش بسزایی بر انتخاب پروانه و موتور دارد. موتور با اعمال ولتاژ بیشتر سریعتر می چرخد و لذا جریان بیشتری می کشد. باید اطمینان حاصل شود که چه مقدار نیروی پیشران توسط موتور تولید شده و چقدر جریان می کشد.
وقتی جریان کشیده شده از ترکیب موتور و پروانه را می دانید، آماده انتخاب ESC هستید.
اندازه گیری های پایه عملکرد موتور براشلس
وقتی تصمیم به انتخاب اندازه موتور گرفتید، شاید همچنان گزینه های زیادی برای انتخاب موجود باشد. برای انتخاب بهترین موتور در این موارد، فاکتور های زیر قابل پیروی هستند:
- نیروی پیشران
- بازدهی و جریان مصرفی
- وزن
اینجا تصمیم به کاربرد شما، استایل پرواز و اینکه چگونه بخواهید پرنده تان پرواز کند، وابسته است.
نیروی پیشران
نیروی پیشران احتمالا اولین چیزی باشد که هنگام انتخاب یک موتور به آن توجه شود.
نیروی پیشران بیشتر به شما شتاب بیشتری می دهد، اما همچنین باید به جریان مصرفی و بازدهی توجه داشت. عمر باتری های خود را با بکارگیری یک ترکیب موتور-پروانه جریان کش، کاهش ندهید. اگر کواد مقدار زیادی جریان در تراتل بالا بکشد، سرعت دشارژ حداکثر باتری باید قادر به پاسخگویی باشد. باتری نیز باید به مقدار کافی ظرفیت داشته باشد تا زمان مورد قبول پرواز را تضمین کند.
درحالیکه نیروی پیشران یک فاکتور مهم در انتخاب یک موتور است، تنها فاکتوری نیست که باید در نظر داشت.
وزن موتور
وزن یک موتور اغلب زیاد بررسی می شود، چراکه فاکتوری مهم در پرنده های مسابقه ای و آکروباتیک می تواند باشد.
چون موتور ها در چهار گوشه فریم قرار می گیرند، تاثیر زیادی روی واکنش گرایی کواد شما دارد. موتور های سنگین تر ممان اینرسی زاویه ای کواد شما را افزایش می دهند، موتور ها باید برای تغییر جهت سخت تر کار کنند.
در عمل، وقتی کواد شما در حال چرخش و جهش است، زمان نیاز دارد تا شتاب زاویه ای بگیرد، به مکان دلخواه رفته و توقف کند. موتور های سنگین تر زمان بیشتری نیاز دارند تا به آن سرعت زاویه ای برسند و همچنین زمان بیشتری می خواهند تا سرعتشان را کم کنند. به این علت است که لخت تر احساس می شوند.
بازدهی و مصرف جریان
بازدهی موتور عموما با تقسیم نیروی پیشران بر توان در 100% تراتل محاسبه می شود، که با گرم بر وات (g/w) اندازه گرفته می شود. هرچه این عدد بیشتر باشد، موتور پر بازده تر است.
مهم است که در کل بازه تراتل به بازدهی توجه شود نه فقط در بالای بازه. شاید بعضی موتور ها در تراتل کمتر پربازده تر باشند، اما می توانند با کشیدن جریان بالاتر با رسیدن به محدوده هایشان بازدهشان کم شود.
روش خوب دیگری برای بازدهی، گرم بر آمپر (نیروی پیشران بر جریان) است.
عموما هر چه بیشتر نیروی پیشران تولید شود جریان بیشتری کشیده می شود تا آن نیرو تولید شود، بنابراین موتورهای با نیروی پیشران بالا و جریان کم ارجحیت دارند. موتور های کم بازده یا نیروی پیشران کمی تولید می کنند و یا جریان زیادی می کشند.
هر موتور به پروانه های مختلف پاسخ های متفاوتی می دهد، انتخاب دقیق پروانه کلید متعادل کردن نیروی پیشران و بازدهی است.
فاکتور های عملکرد موتور کوادکوپتر پیشرفته
بسیاری از ویژگی های موتور های کوادکوپتر توسط سازندگان بیان نمی شود و تنها با آزمایش های تکنیکی بیشتر مشخص می شوند.
- گشتاور
- زمان پاسخگویی
- دما
- لرزش و تعادل
- گشتاور موتور
گشتاور نیرویی است که پروانه را به حرکت در می آورد. گشتاور سرعت افزایش و کاهش RPM را تعیین می کند. به بیان دیگر، اینکه چقدر برای موتور آسان است تا وزن روتور، پروانه و از همه مهمتر، هوا را جابجا کند.
گشتاور به شدت بر عملکرد کواد تاثیر می گذارد، مخصوصا اینکه چقدر دقیق و واکنش گرا در هنگام پرواز حس می شود. یک موتور با گشتاور بالا، به علت تغییر سریعتر RPM، پاسخ محکم تری می دهد. حتی شاید با گشتاور بیشتر، تکان های پروانه کمتر حس شود.
گشتاور بالا به معنی این است که می توانید پروانه سنگین تری را به حرکت درآورید (با مصرف جریان بیشتر). اگر یک موتور پروانه ای را بچرخاند که برایش بسیار سنگین باشد (اصطلاحا اضافه پروانه)، نمی تواند نیروی کافی برای چرخاندن آن در RPM دلخواه را تولید کند که نتیجه آن بازدهی پایین و اضافه حرارت است.
ابته یک نقص گشتاور بالا، نوسان است. موتور های گشتاور بالا قادر به تغییر سریع RPM هستند که در واقع می تواند خطا را (در حلقه PTD) تقویت کنند که باعث نوسانی می شود که حذف آن حتی با تنظیم PID، مخصوصا حول محور قائم سخت می شود.
زمان پاسخگویی
زمان پاسخگویی موتور به گشتاور نیز بستگی دارد، موتور های گشتاور بالا اغلب پاسخ سریعتری دارند. روش ساده برای اندازه گیری زمان پاسخ، اندازه گیری زمان رسیدن RPM موتور از صفر تا حداکثر است.
زمان پاسخگویی به مقدار زیادی از وزن و گام پروانه انتخابی تاثیر می گیرد. در نظر داشته باشید که شرایط جوی نیز می تواند موثر باشد. برای مثال در ارتفاع کم، هوا متراکم تر است، یعنی تعداد مولکول های بیشتری وجود دارد که پروانه باید به صورت فیزیکی جابجا کند تا نیروی پیشران تولید شود. در ارتفاع زیاد، پروانه ها سریعتر چرخیده و به تغییرات تراتل واکنش سریعتری نشان می دهند. اما نیروی پیشران کلی کاهش می یابد، چراکه تعداد کمتری مولکول هوا وجود دارد که پروانه با آن سروکار داشته باشد.
دما
دما بر موتورهای براشلس تاثیر می گذارد، چراکه مگنت های استفاده شده در موتور ها در دمای بالا میدان مغناطیسی ضعیف تری دارند، آنها همچنین در دمای بسیار بالا سریع تر مغناطیس خود را از دست می دهند که بر طول عمرشان تاثیر گذار است.
اضافه پروانه کردن موتور و استفاده بیش از حد از تراتل کامل، حرارت موتور ها را بالا می برد. این کار موجب فرسایش موتور و مگنت ها در گذر زمان می شود. بنابراین طراحی موتور هایی که به خنک سازی کمک می کند اغلب به طولانی شدن عمر آنها منجر می شود. البته به شرطی که در تصادف صدمه نبیند!
لرزش
لرزش های تولیدی توسط موتور ها اثرات جانبی منفی مختلفی بر عملکرد کواد دارند.
اگر یک موتور تعادل یا کیفیت ساخت ضعیفی داشته باشد، احتمالا لرزشی را تجربه خواهید کرد که می تواند بر کنترلر PID تاثیر گذارد. وقتی با تغییر سطح تراتل، فرکانس لرزش تغییر کند، می تواند کار کواد را برای تنظیم سخت کند.
یک موتور با لرزش، مقدار زیادی نویز الکتریکی نسبت به حالتی که نرم عمل می کند، تولید می کند. این نویز الکتریکی می تواند بر سنسور ژیرو تاثیر گذارد، عملکرد پرواز را بدتر کند و همچنین کیفیت ویدیوی FPV را اگر از باتری مشترک سیستم FPV با موتور ها و ESC ها استفاده شود، پایین بیاورد.
بسیاری توانسته اند موتور ها و FC را با برخی نتایج واقعا مثبت به نرمی نصب کنند.
به خاطر داشته باشید که پروانه های آسیب دیده، خم شده و نامتعادل می توانند لرزش های مشکل ساز به وجود آوردند.
ویژگی های موتور کواد
متغیر های بسیاری وجود دارد که بر عملکرد یک موتور تاثیر می گذارند و این می تواند بسیار مشکل ساز و پیچیده شود. برای مثال، در موتور های با سایز و KV یکسان، حتی با وجود پروانه های یکسان، نیروی پیشران، جریان مصرفی و زمان پاسخگویی بسیار متفاوتی می توان داشت. تفاوت در طراحی و مواد هر دو تاثیر بسزایی در عملکرد دارند.
در اینجا چند ویژگی طراحی متفاوت موتور که در عملکرد بهتر تاثیر می گذارند و می توانند ویژگی های موتور را تغییر دهند اشاره شده است.
شفت تو خالی
در ساختار شفت تو خالی از میله توپر با همان وزن، سخت تر خم می شود. اما ایجاد سوراخ در وسط شفت می تواند قیمت ساخت را به مقدار قابل توجهی افزایش دهد.
انواع مگنت ها
مگنت های استفاده شده در موتور های براشلس کوادکوپتر بر اساس قدرت میدان مغناطیسی شان درجه بندی می شود؛ از قبیل N52، N54 و غیره. هرچه عدد بالاتر باشد، میدان مغناطیسی قوی تر است.
از نظر تئوری یک میدان مغطیسی قوی تر قابلیت تولید توان را به صورت پر بازده تر با فراهم کردن گشتاور بیشتر و زمان پاسخ موتور سریع تر دارد.
وقتی یک موتور را با دست می چرخانید، می توانید شکاف ها را حس کنید. هر چه قویتر حس کنید، چیز بدی است، چراکه به شما می گوید چه مقدار نیروی مغناطیسی قوی است و چه مقدار در بین مگنت ها ضعیف است یا حتی میدانی نیست. حس های کمتر نشان دهنده موتور صاف تر است.
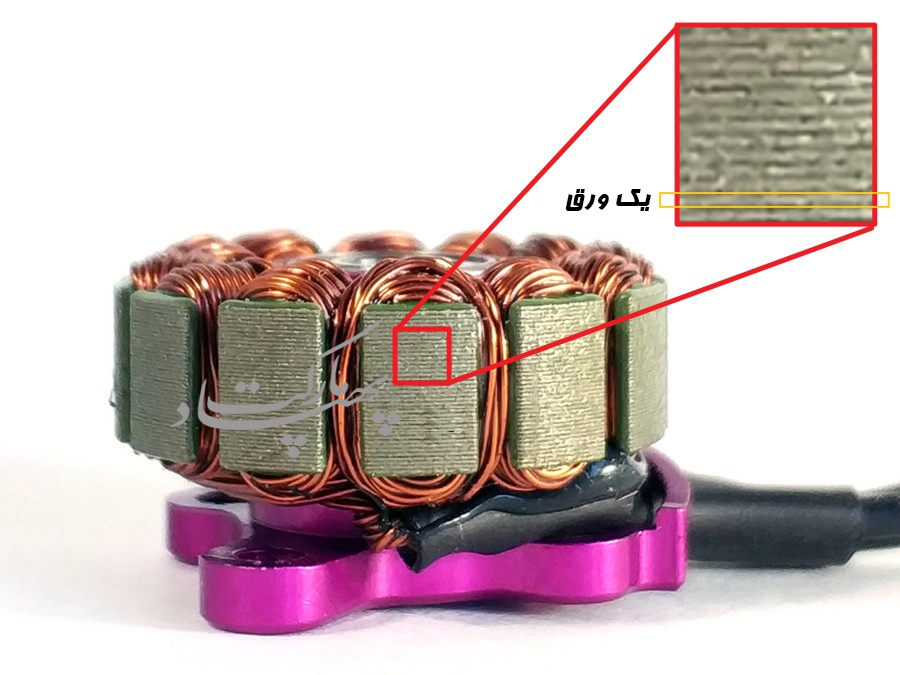
ضخامت تورق استاتور
تورق، ضخامت صفحات فلزی چسبیده شده در استاتور است. تورق نازک تر این اجازه را می دهد که تعداد لایه های بیشتری را برای یک ارتفاع یکسان از استاتور موتور به کار بگیرید.
به طور خلاصه، تورق نازک تر استاتور، بهتر است. ورقه ها کمک می کنند که جریان گردشی که باعث بوجود آمدن حرارت در یک محیط مغناطیسی متغیر بوجود می آید، کاهش یابد. ورقه های نازک تر به معنی تلف شدن کمتر توان در جریان گردشی بوجود آمده (عامل بوجود آمدن میدان مغناطیسی غیر دلخواه) و قویتر و پر بازده کردن موتور است .
فاصله هوایی
فاصله هوایی در موتور به فاصله بین مگنت ها و استاتور مربوط می شود. نیروی مغناطیسی به صورت غیرخطی با فاصله افت می کند. لذا کاهش فاصله بین این دو، توان موتور را بطور قابل ملاحظه ای افزایش می دهد.
فاصله هوایی کوچکتر نه تنها موتور را قوی تر می کند، گشتاور و پاسخ را نیز بهبود می بخشد. یک نگرانی وجود دارد که با گذر زمان اگر هسته روتور خللی در آن وارد شده و از حالت صافی درآید، مگنت ها با استاتور برخورد کرده و باعث ساییدگی می شود.
شکل مگنت – مگنت های انحنادار
استفاده از مگنت های انحنادار (مگنت های منحنی) روشی است که مگنت ها را هر چه بیشتر به استاتور نزدیک کرد که اجازه می دهد فاصله هوایی کوچکتر و با ثبات تر شود.
در حقیقت، روشی که یک مغناطیس دائم کار می کند یعنی با یک مگنت منحنی، دیگر قویترین نقطه مغناطیسی هر قطب روی سطح مگنت نیست، در حالیکه در مگنت های استاندارد (غیر انحنادار) اینگونه است.
مرکز ثقل میدان قطب در خارج منحنی پایین سطح مگنت و مرکز ثقل قطب در داخل منحنی بالای سطح خواهد بود. در این حالت، میدان مغناطیسی مگنت و الکترومگنت به یکدیگر نزدیک تر شده اند.
جدای از شکل، بعضی سازندگان موتور های کواد را با ضخامت های متفاوتی از مگنت، آزمایش می کنند. اغلب پیداکردن اینکه یک مگنت نازک تر (و درنتیجه آن میدان مغناطیسی ضعیف تر) در واقع می تواند نتایج بهتری را ارائه دهد.
C-Clip/E-Clip/شفت پیچی
برای نگه داشتن هسته روتور به موتور، سازندگان موتور یکی از این روش ها را در زیر موتور استفاده می کنند تا شفت را در جای خود چفت کنند: C-clip، E-clip یا پیچ. هر کدام از این روش ها موافقان و مخالفان خود را دارند و سخت است که بگوییم کدام بهتر است.
عموما پیچ ها برای تعمیرات بهترند چراکه به سادگی باز می شوند، اما پیچ ریسک سفت شدن بیش از حد و قفل کردن شفت را دارد (موتور سخت تر می چرخد).
گزارش هایی درباره خارج شدن C-clip هنگام پرواز شده است که باعث خروج هسته روتور و اختلال در عملیات پرواز شده است. هرچند پیچ ها نیز از این مشکل مبرا نیستند.
قسمت زیرین باز یا بسته؟
در طراحی پایه موتور، طرح قسمت زیرین بسته رایج تر است و جدیدتر از آن استایل قسمت زیرین باز است. موافقان و مخالفان برای هر دو طرح وجود دارد.
طرح “بخش تحتانی بسته” یعنی پایه ای قوی تر، اگرچه در “بخش تحتانی باز” با حذف ماده اضافی سبک تر است، وزن صرفه جویی شده 2 گرم است.

موتور های تحتانی بسته کمتر احتمال جمع شدن کثیفی درون آن وجود دارد. البته در تحتانی باز تمیز کردن داخل موتور آسان تر است.
با تحت باز، می توان دید که پیچ ها چه مقدار داخل می شوند و از احتمال اتصال سیم پیچی موتور در صورت دراز بودن پیچ کمتر است. (این داستان معمولا برای تازه کار ها در موتور های تحت بسته رخ می دهد).


هرچند به زیرین-بسته در هنگام کرش کردن و کشیده شدن سیم ها، تنش کمتری وارد می شود.
طرح حلقه شار
حلقه شار، حلقه فولادی گرد داخل هسته روتور است که مگنت ها را شامل می شود. هسته روتور معمولا از آلومینیوم ساخته می شود، در حالیکه حلقه شار از فولاد ساخته می شود چون باید به خطوط میدان مغناطیسی پاسخ دهد.
جدیدترین طرح حلقه شار به جای شکل دایره ای، شکل دلخواه دارد که می تواند خطوط بیشتری از میدان مغناطیسی را به موتور برگردانده و گشتاور را بیشتر کند.
سایر ویژگی های موتور براشلس
- گوشه های لحیم کاری
- ESC داخلی
- طراحی خنک سازی
سازندگان موتور دائما در حال آزمایش طرح های مختلف و ضمیمه کردن سخت افزار ها هستند که منجر به پیشرفت هایی در خنک سازی و حتی جاسازی ESC در موتور هستند. گوشه های لحیم کاری می تواند مفید باشد، این به شما اجازه می دهد تا از یک سیم نازک تر استفاده کرده و در وزن صرفه جویی کنید. همچنین در هنگام خروج سیم ها به راحتی قابل تعمیر هستند.
موتور های براشلس ساعتگرد و پادساعتگرد
احتمالا بر روی موتور های براشلس عبارت CW یا CCW را مشاهده کنید که منظور ساعتگرد و پادساعتگرد است.
اگرچه این مورد در موتور های براش دار اهمیت دارد و چرخش در خلاف جهت باعث فرسودگی سریع تر براش ها می شود، اما در موتور های براشلس از این جهت محدودیتی نیست.
موتور های براشلس ساعتگرد و پادساعتگرد اساسا یک نوع موتور هستند و در هر دو جهت می توانند بچرخند. تفاوت در جهتی است که شفت پروانه بسته می شود.
موتور ها در یک کواد در جهت های مختلف می چرخند، نکته اینجاست که وقتی موتور ها می چرخند، پیچ همه پروانه ها سفت می شود.
(برای اینکه بدانید موتور با پیچش درست دارید، پیچ پروانه را روی شفت نگه داشته و شروع به چرخاندن موتور با دست کنید.اگر پیچ سفت شد، جهت موتور درست است).
بالانس کردن موتور براشلس
وقتی موتور می گیرید، اولین کاری که باید بکنید بالانس کردن آن است. اگرچه همیشه لازم نیست، کار خوبی است.
برای بسیاری از برند ها این کار لازم نیست چون عموما کیفیت خوب است. هرچند با آمدن گزینه های ارزان قیمت از توجه نشدن به کیفیت موتور تعجب نکنید.